
In this year of Rudolf Kalman’s demise, this article is dedicated to his memory.
We introduce a new Machine Learning (ML) solution for Dynamical, Non-linear, In-Stream Analytics. Clearly, such a solution will accommodate Static, Linear and Offline (or any combination thereof) Machine Learning tasks. The value of such a solution is significant because the same method can be used for classification and regression (including forecasting), offline and real-time applications and simple and hard ML problems.
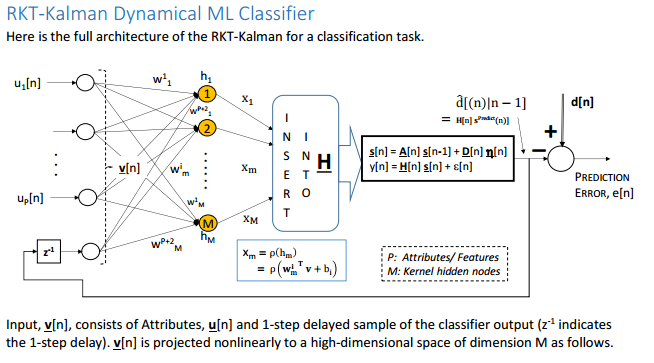
We have achieved our objective in the form of State-space Recurrent Kernel-projection Time-varying Kalman or “RKT-Kalman” method. RKT-Kalman is a pragmatic combination of some well-known and less well-known rigorous theoretical solutions and some unique insights into how they can be combined effectively to solve practical problems.
RKT-Kalman utilizes non-linear projection and Cover Theorem, Kernel method, State-space data model, Bayesian Conditional Expectation estimation via Kalman Smoothing, Prediction, Filtering & Forecasting with State augmentation for time-varying estimation.
With a hard nonlinear classification problem and a hard real-life non-stationary data problem, we have demonstrated the impressive performance of RTK-Kalman solutions. Since the tests performed address some of the extreme cases, it is fair to state that most other typical Machine Learning problems will be effectively solved using Recurrent Kernel-projection Time-varying Kalman method.
The practicality of RTK-Kalman Method in Offline and In-Stream mode means that learning can happen from “past experience AND the results of new action”. Therefore, ML business solutions need not be “one and done” but can be deployed like flu shots (adjust the mix based on new learning and apply on a repeated basis), thus achieving the full promise of Dynamical Machine Learning for Data Science business applications.
Click here to read full article (PDF format)
PS: I privately refer to RKT-Kalman as “Rocket” Kalman! 🙂 “RKT” naturally expands to “Rocket” and more importantly, it is a nod to Kalman Filter and its use in rocketry, Apollo program, satellite navigation, GPS and the like.
About the Author
PG Madhavan, Ph.D. – “Data Science Player+Coach with deep & balanced track record in Machine Learning algorithms, products & business”. PG is an expert in Predictive Analytics. He has 20+ years of software products, platforms and framework experience in leadership roles at major corporations such as Microsoft, Lucent, AT&T and Rockwell and startups, Zaplah Corp (Founder and CEO) and Solavei.
{kind=link}