
This article was written by Joyce Xu.
With the rise of autonomous vehicles, smart video surveillance, facial detection and various people counting applications, fast and accurate object detection systems are rising in demand. These systems involve not only recognizing and classifying every object in an image, but localizing each one by drawing the appropriate bounding box around it. This makes object detection a significantly harder task than its traditional computer vision predecessor, image classification.
Fortunately, however, the most successful approaches to object detection are currently extensions of image classification models. A few months ago, Google released a new object detection API for Tensorflow. With this release came the pre-built architectures and weights for a few specific models:
- Single Shot Multibox Detector (SSD) with MobileNets
- SSD with Inception V2
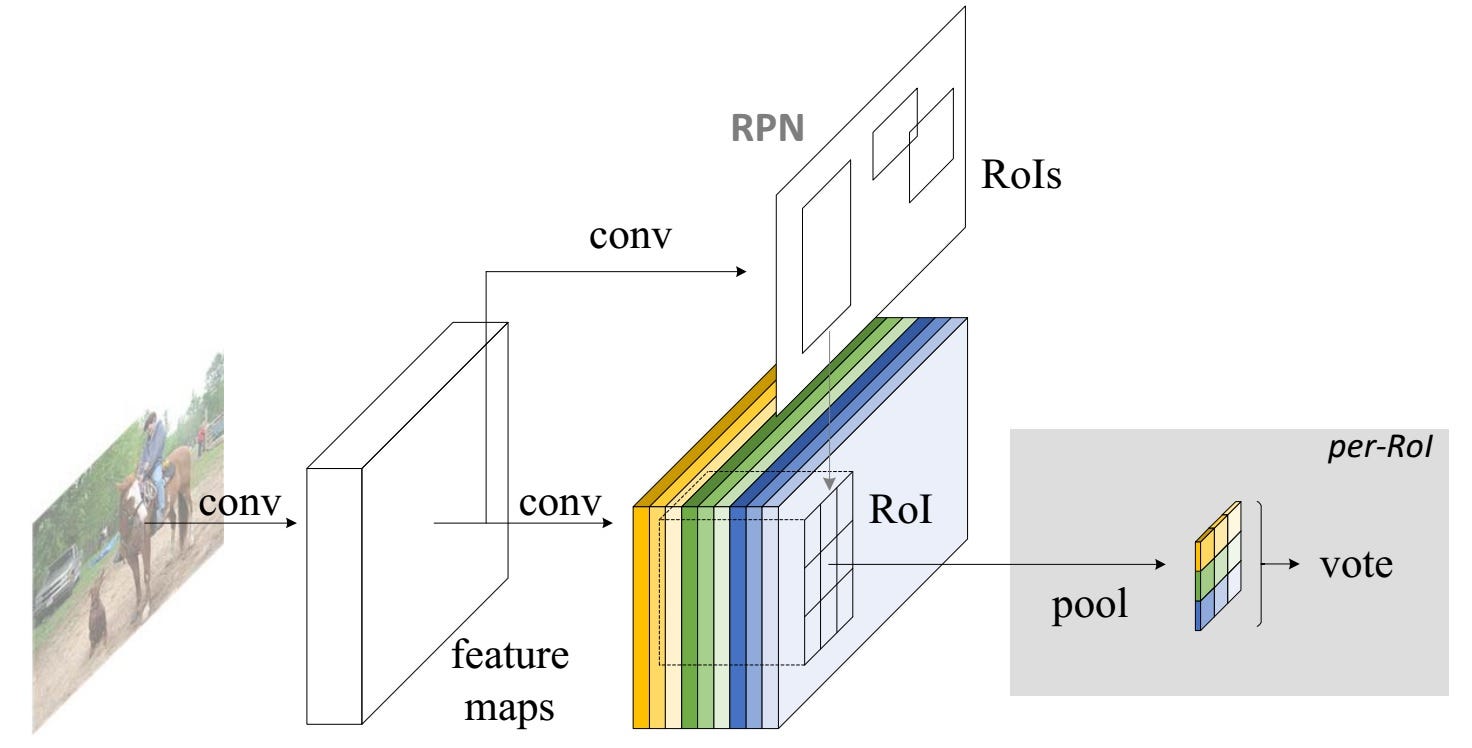
- Region-Based Fully Convolutional Networks (R-FCN) with Resnet 101
- Faster RCNN with Resnet 101
- Faster RCNN with Inception Resnet v2
In my last blog post, I covered the intuition behind the three base network architectures listed above: MobileNets, Inception, and ResNet. This time around, I want to do the same for Tensorflow’s object detection models: Faster R-CNN, R-FCN, and SSD. By the end of this post, we will hopefully have gained an understanding of how deep learning is applied to object detection, and how these object detection models both inspire and diverge from one another.
Faster R-CNN, R-FCN, and SSD are three of the best and most widely used object detection models out there right now. Other popular models tend to be fairly similar to these three, all relying on deep CNN’s (read: ResNet, Inception, etc.) to do the initial heavy lifting and largely following the same proposal/classification pipeline.
At this point, putting these models to use just requires knowing Tensorflow’s API.
To read the whole article, with each point detailed and illustrations, click here.
{kind=link}